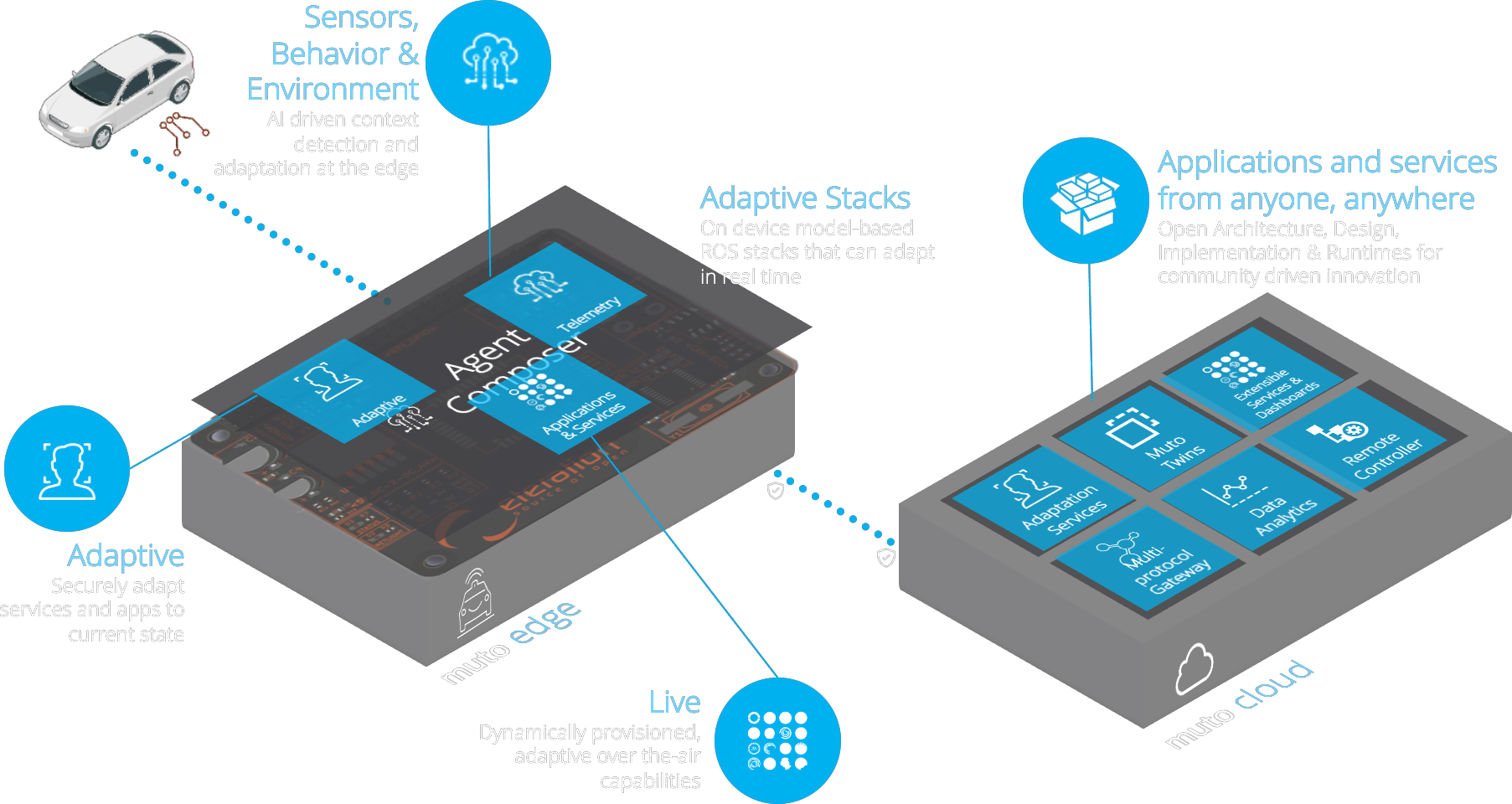
an adaptive framework and a runtime for dynamically composable model-driven software stacks for ROS
![[object Object]](/docs/img/modular.png)
Adaptive
Muto is a context aware software solution to address some of the runtime adaptivity challenges in autonomous and robotic platforms. Adaptive Muto stacks support connected architectures for autonomous and software-defined vehicles, including supporting cloud-based apps and services that can dynamically change.
ROS
Muto is a platform that supports ROS from Open Robotics.The Robot Operating System (ROS) is a set of software libraries and tools for building robot applications. ROS has widespread use in many autonomous applications such as the Autoware.Auto open-source autonomous driving stack , as well as many other opensource and commercial systems and solutions.
Extensible
Muto is built on an extensible architecture. Similar to plugins and the extension points that are foundational to Eclipse extensibility. many of Muto's functionality are implemented as plugins that you can easily replace and modify for your requirements. You can add new ROS nodes for controlling, monitoring, composing and adapting vehicle behavior as plugins. The Muto dashboard is also extensible with our own LiveUI framework.